Gyroscopic
Stabilization

Introduction of Gyroscope
(A) Axis Of Spin
If a body is revolving about an
axis, the latter is known as axis of spin.
(B) Precession
Precession means the rotation about
the third axis which is perpendicular to both the axis of spin and axis of
couple
(C) Axis Of Precession
The third axis is perpendicular to both the axis of spin and that of couple is known as axis of precessions.
(D) Gyroscope
It is a body while spinning about
an axis is free to rotate in other directions under the action of external
forces. Examples;; Locomotive, automobile and aero plane making a turn. In certain
cases the gyroscopic forces are under sirable whereas in other cases the
gyroscopic effect may be utilized in developing desirable.
(E) Gyroscopic Effect
To a body revolving (or spinning)
about an axis of spin, if a couple represented by a vector OY perpendicular to
axis of spin, then the body tries to process about third axis which is
perpendicular both axis of spin &couple. Thus the plane of spin, plane of
precession and plane of gyroscopic couple are mutually perpendicular. The above
combined effect is known as gyroscopic effect.
The expression for the gyroscopic
couple is given as:
C = I.⍵.⍵p
Where , C is the gyroscopic couple
I is the moment of inertia
⍵ is the angular velocity
⍵p is the angular velocity of precession
History of gyroscopic
stabilizers
The first experimental gyroscopes
were developed in the late 1860s and early 20th century with less than
desirable results. Several large ships used the technology, including the USS
Henderson, a troop transport ship, in 1917, which had two 25-ton units, and an
Italian cruise liner used three large units in 1930. The cost and weight of the
systems became prohibitive, and other forms of stabilization became more
readily available. External fin stabilization, which used the speed of the
vessel to create stabilization against capsize, became more popular, but by no
means more practical - especially with sport anglers.
What is Gyroscopic
Stabilization?
A gyroscopic stabilizer is a
control system that reduces tilting of ships and aircraft. It senses direction
with a small gyroscope and counteracts rotation by adjusting the control
surface or applying force to the large gyroscope. The process associated with
this system is called Gyroscopic stabilization.
How does Gyroscopic
Stabilization Work?
Gyro stabilization works by
attaching a state-of-the-art FOG (fiber optic gyroscope) or MEMS (micro
electromechanical system) gyroscope to the camera base to measure any movement
that may occur. When the gyroscope senses motion, it sends commands to the
pan/tilt unit to apply an opposing rotation to the camera to counteract that
motion. This keeps the image on target even in the presence of large motion
shifts (up to pan/tilt rotation limits). Performance depends on gyroscope
accuracy, system latency, and pan/tilt motor speed and accuracy. These
components can quickly become expensive, so we configure the camera
individually for situation.
Before purchasing a gyro
stabilization system, it is important to check the specifications of the
pan/tilt system. This is because it must be able to operate quickly and
accurately enough to stabilize the image. Not all gyro stabilization systems
are created equal. The type of system need depends on intended use.
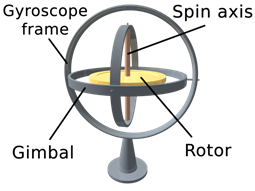
Parts of a Gyro
A gyro consists of 3 basic parts.
flywheels, gimbals, and damping systems. The flywheel size and rotational speed
determine a factor called angular momentum. A gimbal rotates the flywheel
around an axis perpendicular to the axis of rotation. The speed at which the
gimbal rotates (precession) as the boat rolls is a factor called angular
velocity. The damping system controls how fast the gimbal can handle. Depending
on the manufacturer, damping systems may be passive or active.
What are the advantages
and disadvantages of gyroscopic stabilizer systems?
Gyroscopes have no appendage, are
relatively small and compact, and are well designed to minimize the intense
heat generated at the bearings by the rotating mass. Gyroscopes come in an
attractive package and work well in many circumstances.
Disadvantages of gyro systems are
that they are less efficient, are heavy, and in some cases service requires
removing the unit from the ship. For a 30-knot boat, the gyro needs to be much
larger—perhaps larger than the space allows—to match the performance of the
Vector Fins, so sometimes two or three gyros will be installed. The systems can
take up to an hour to "spin up" before providing full stabilization,
they also generate noise, may require structural bracing and, with few
exceptions, are completely dependent on AC power from a generator. In certain
sea conditions, their effectiveness is also limited by the lift or precession
distance, and when it is time to replace the main bearings, most gyroscopes
must be removed from the ship and returned to the factory for repair.
Applications of
Gyroscopic Stabilizations
Small, precise, and stable
platforms are used in a variety of applications. These are especially useful
for aiming subsystems such as cameras, laser range finders, radars, and
antennas at specific targets while the mounted platform is in motion. Adapting
a detection system from stationary to mobile use requires consideration of many
criteria such as vibration and stabilization.
Mast & Tower
Just because a mast or tower is a
solid structure attached to the ground does not mean it's perfectly stable. For
example, the top of the Eiffel Tower in Paris can sway six to seven meters in
the wind.
For mast and tower applications,
gyro stabilization is recommended based on the distance and size of the target
being tracked and the height and stability of the tower.
Vehicle
Expectations for in-vehicle cameras
are very different. It can be affected by large movements, but I often work
with a wider field of view, so I don't mind the effects of camera shake.
Stabilization requirements vary depending on camera type, field of view,
vehicle speed, and terrain conditions traversed.
Marine
A vessel on the ship experiences
many movements, but this movement is a different type than a tower or an
all-terrain vehicle. Ship-mounted cameras require varying degrees of
gyro-stabilization, depending on the size of the ship and the field of view of
the camera.

Pitching
Case :
1.
If bow of ship is down & stern
is up , then Ship turns Right
2.
If bow of ship is Up & stern is
down , then Ship turns Left
Steering
Case :
1.
When ship takes right turn , bow will go
down & stern will go Up
2.
When ship takes Left turn , bow will go up
& stern will go down
Robotics
It can be used in robots in order
to balance them, if a robot knows it is falling it can be programmed to react.
In this case with a little bit of programming a gyro would be able to inform a
robot if it is falling over.
Airplanes
Gyroscope is used on almost all
flight controller boards to give accurate measurements for the aircraft's
orientation. It provides ease to keep a track of plane’s orientation
mid-flight. This instrument can be used with further advancement to automate
the flight system as to make an autopilot system for the aircraft.
Case 1 : Aeroplane takes Right Turn
In this case
Nose will go down & Tail will go Up

Case 2 : Aeroplane takes Right Turn
In this
case Nose will go Up & Tail will go down

REFERENCES:
1. The Gyroscope and it’s
Applications by Dr. Ing Helmut Sorg
2. Gyroscope-Based Video
Stabilization for Electro-Optical Long-Range Surveillance Systems - by Petar D.
Milanović, Ilija V. Popadić and Branko D. Kovačević
3.
https://www.infinitioptics.com/glossary/what-active-gyro-stabilization-and-why-it-important-long-range-ptz-cameras
4. S.S. Rathan (2009), Theory of
Machines,3rd edition, Tata MC Graw Hill Education Pvt.td, New Delhi.
5. SadhuSingh (2012), Theory of
Machines,3rd edition, Pearson, New Delhi.
Written By :
|
PRN No. |
Name |
Roll No |
|
12010547 |
Harsh Rikame |
1 |
|
12010299 |
Samarth Ikkalaki |
6 |
|
12010965 |
Aditya Inamdar |
7 |
|
12011087 |
Vaishnavi Jade |
8 |
|
12011262 |
Kashyap Kadam |
19 |
Nicely explained about Gyroscopic stabilization... Great work 👍
ReplyDeleteAmazing work guys... I really like your blog...
ReplyDeleteExcellent !! Keep it up 👍🏻
ReplyDeletegreat content guys!!!!!
ReplyDeletekeep it up.....
Great Content
ReplyDelete